AGV無人搬運車是什麼?無人搬運車推薦:小型、輕量、省能源
什麼是AGV無人搬運車?
貨物的流動決定了工廠的生產效率,近來自動化設備開始逐漸串成生產線系統,但物料的供給或搬運,依然仰賴人員搬運作業,生產線或工作站形成獨立的孤島,導致物流、生產流經常不順暢或是有中斷的狀況,而生產線並不想要佔龐大空間,且具備搬運的機能的設備,而最有效率的方案,就是無人搬運車AGV(Automation Guided Vehicle) 來對應。
無人搬運車(AGV)為可依預定路徑或程式行進的無人載具,達成省人化與效率提昇,但真正的運用核心在於物流規劃、生產經驗、控制邏輯、量產實施。
無人搬運車(AGV)經過多年的研發與實地驗證,可穩定執行物流搬運工作,甚至與生產控制系統MRP,MES系統連線,實現工業4.0的境界,而未來幾年的製造趨勢將會無人搬運車系統(AGV System)來取代「腳」的作業。
由祥儀專業工業用AGV研發團隊,以科技寶套件設計的KUBOT 類智能搬運機器人,是一款(),分為色帶循跡版本(AGV類無人搬運車/ Automated Guided Vehicle)以及ROS Navigation無軌版本(AMR自動智能機器人/ Autonomous Mobile Robot)兩種產品
無人搬運車推薦|小型、輕量、省能源 3種願望一次滿足

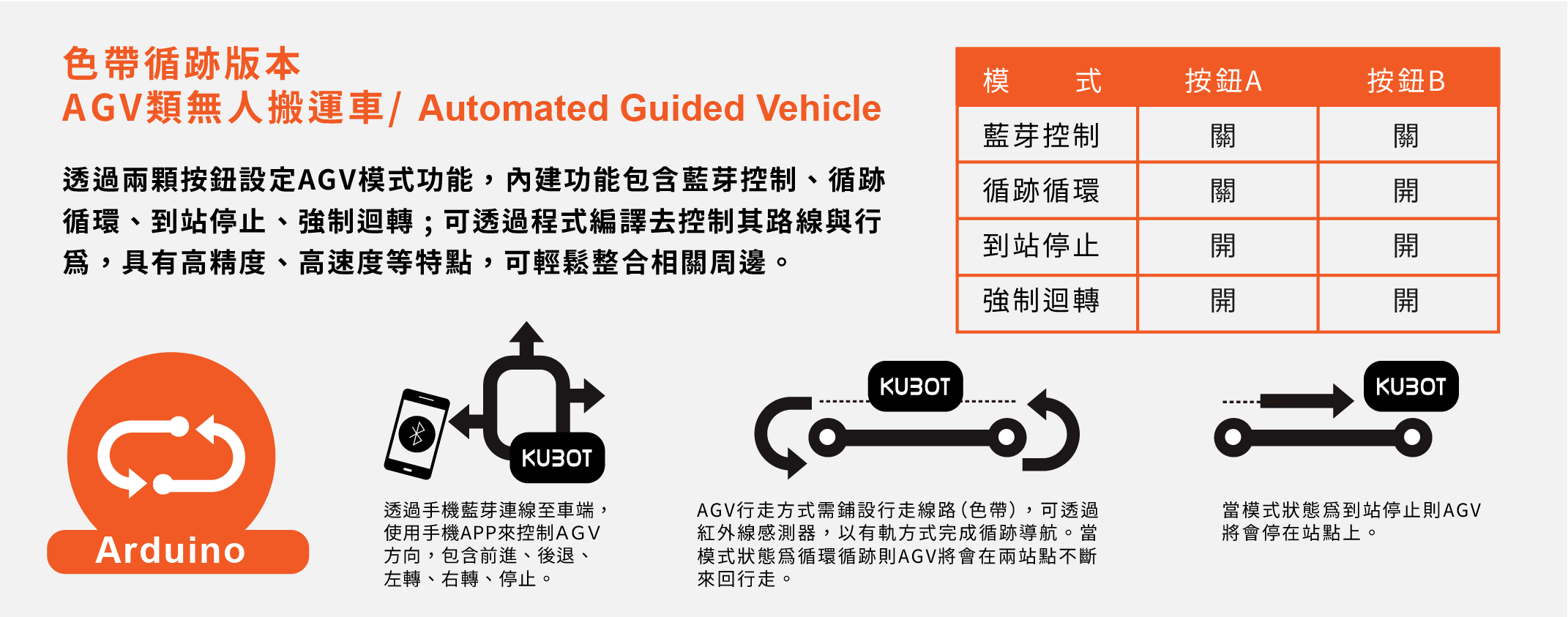
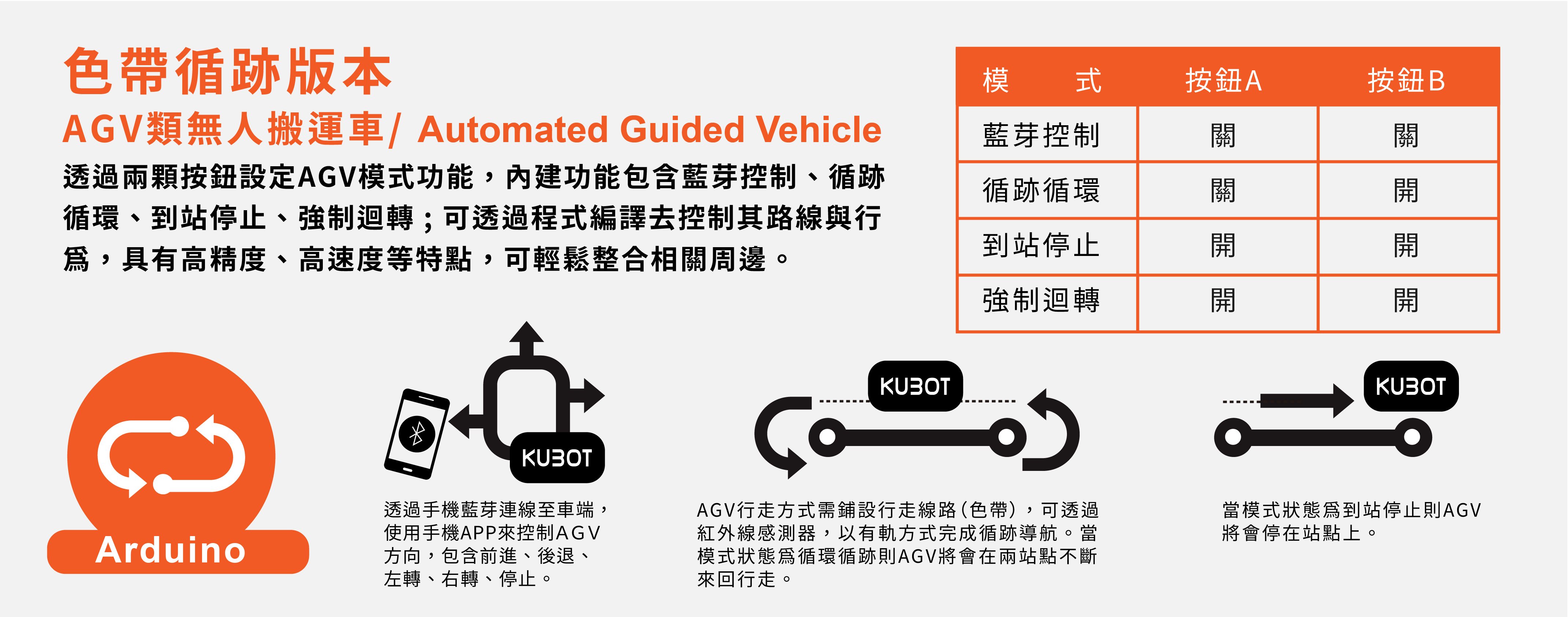
 色帶循跡版本(AGV類無人搬運車/ Automated Guided Vehicle)
以科技寶建立機構平台,穩固、多元、好上手的特性,結合各式電子、傳動元件以及多媒材的整合應用,可迅速打造你的好點子。
色帶循跡版本KUBOT是一款利用紅外線循跡功能,進行色帶軌道導航,以工業等及高扭力有刷馬達為驅動,可載重15KG之物件;採用色帶循跡導航系統,支援Arduino開源軟體、RFID、超音波、紅外線等擴充電子元件,可執行有安全保護及多項功能。
色帶循跡版本(AGV類無人搬運車/ Automated Guided Vehicle)
以科技寶建立機構平台,穩固、多元、好上手的特性,結合各式電子、傳動元件以及多媒材的整合應用,可迅速打造你的好點子。
色帶循跡版本KUBOT是一款利用紅外線循跡功能,進行色帶軌道導航,以工業等及高扭力有刷馬達為驅動,可載重15KG之物件;採用色帶循跡導航系統,支援Arduino開源軟體、RFID、超音波、紅外線等擴充電子元件,可執行有安全保護及多項功能。
AGV無人搬運車特色與運用介紹
ROS Navigation無軌版本(AMR自動智能機器人/ Autonomous Mobile Robot)
色帶循跡版本(AGV類無人搬運車/ Automated Guided Vehicle)
以科技寶建立機構平台,穩固、多元、好上手的特性,結合各式電子、傳動元件以及多媒材的整合應用,可迅速打造你的好點子。
ROS Navigation無軌版本KUBOT是一款利用雷達進行無軌導航及功能,以工業等及高扭力有刷馬達為驅動,可載重15KG之物件;採用ROS無軌導航系統及全心擴展卡EKF多船趕氣姿態融合演算法,具有ROS里程反饋、動態/電機PID調速、自動導航、動態避障、AMCL定位、URDF模型、支援鍵盤控制構件地圖等功能,搭載核心IPC- Raspberry pi 3b+及核心MCU- Arduino開源軟體,具有自動導航、自動避障、安全保護及多項功能。搭載Arduino作為下位機,連接樹梅派進行上位機控制。透過雷達建立2D地圖,可從電腦或手機端進行遠程操控,適用於模擬派車系統/派車系統開發、點對點運輸、智慧物流運輸、智慧移動保全、RGV硬碟處理機等
返回